Semantic Tracklets: An Object-Centric Representation
for Visual Multi-Agent Reinforcement Learning
University of Illinois at Urbana-Champaign (UIUC)
International Conference on Intelligent Robots and Systems (IROS), 2021
Abstract
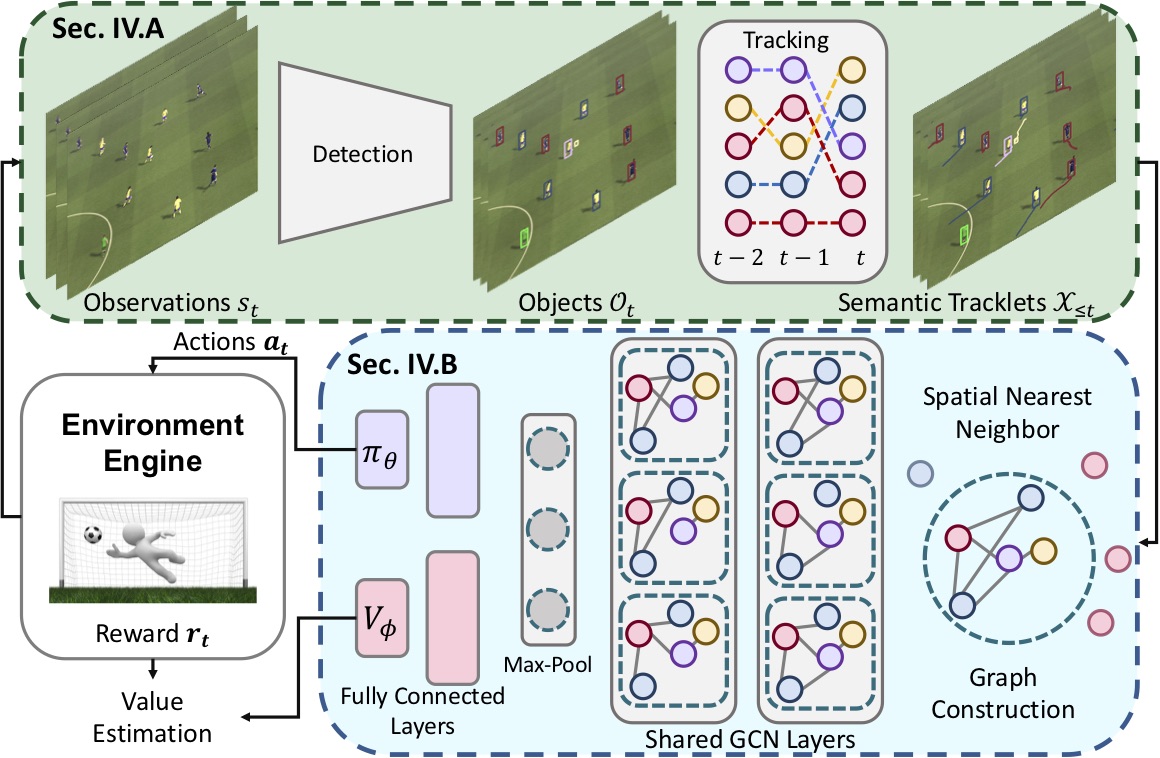
Solving complex real-world tasks, e.g., autonomous fleet control, often involves a coordinated team of multiple agents which learn strategies from visual inputs via reinforcement learning. Many existing multi-agent reinforcement learning (MARL) algorithms however don’t scale to environments where agents operate on visual inputs. To address this issue, algorithmically, recent works have focused on non-stationarity and exploration. In contrast, we study whether scalability can also be achieved via a disentangled representation. For this, we explicitly construct an object-centric intermediate representation to characterize the states of an environment, which we refer to as ‘semantic tracklets.’ We evaluate ‘semantic tracklets’ on the visual multi-agent particle environment (VMPE) and on the challenging visual multi-agent GFootball environment. ‘Semantic tracklets’ consistently outperform baselines on VMPE, and achieve a +2.4 higher score difference than baselines on GFootball. Notably, this method is the first to successfully learn a strategy for five players in the GFootball environment using only visual data.
Videos: Qualitative results for GFootball 11 vs. 11 (N=5)
Videos: Qualitative results for GFootball 11 vs. 11 (N=3)
Citation
@inproceedings{semtrack-2021,
title = {Semantic Tracklets: An Object-Centric Representation for Visual Multi-Agent Reinforcement Learning},
author = {Iou-Jen Liu$^\ast$ and Zhongzheng Ren$^\ast$ and Raymond A. Yeh$^\ast$ and Alexander G. Schwing},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2021},
note = {$^\ast$ equal contribution},
}
Acknowledgement
This work is supported in part by NSF under Grant #1718221, 2008387, 2045586, and MRI #1725729, UIUC, Samsung, Amazon, 3M, and Cisco Systems Inc. RY is supported by a Google Fellowship.